
2019.06.28 研究・成果
「オオクモヒトデの動き 5本腕と6本腕で相違」水流による協調運動か
北海道大学大学院生命科学院の脇田大輝さん(大学院生)と広島大学大学院理学院の早瀬友美乃研究員、北海道大学電子科学研究所の青沼仁志准教授の研究グループは、ヒトデに似た棘皮動物「オオクモヒトデ(Ophiarachna incrassata)」が体を風船のようにしぼんだり膨らませたりする運動の同期パターンが5本腕と6本腕で異なることを発見。この運動が、神経回路によらない水流の働きによる協調運動で成り立つことを数理モデルで証明することに成功したと発表した。複雑なコントロールなしに協調的なリズムを生み出す設計論として、ロボット工学等への利用が期待される。






特集ページ紹介
-
<座談会>東海大学が推進する高度医療人材養成拠点形成事業
-
特集「AI時代の電力需給展望」
企画:電気事業連合会

-
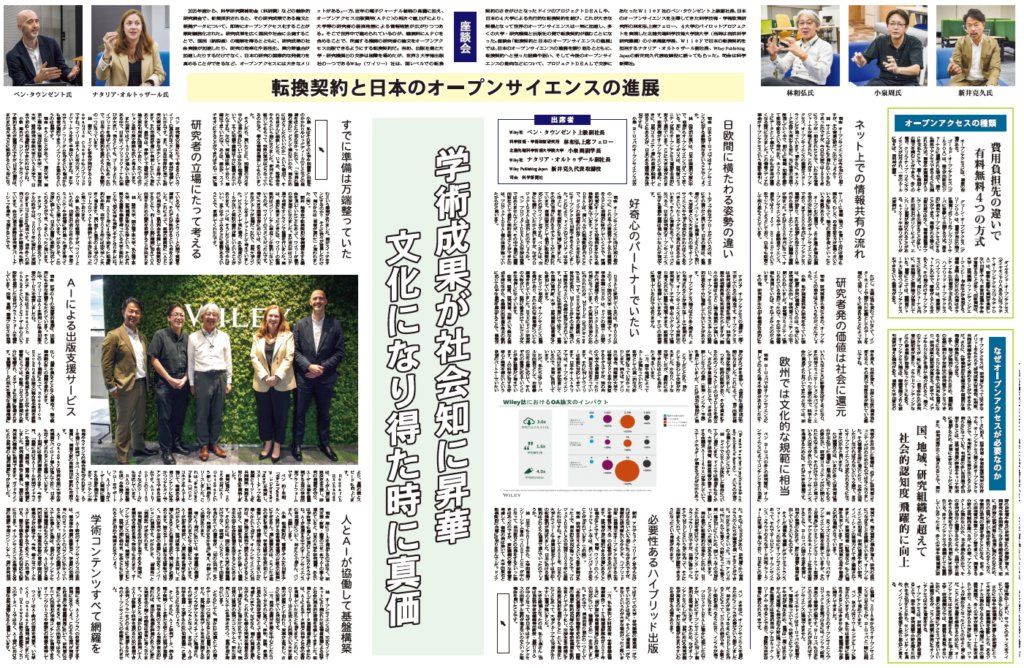
<座談会>転換契約と日本のオープンサイエンスの進展
学術成果が社会知に昇華文化になり得た時に真価
-
第48回日本分子生物学会年会
12月3日~5日 パシフィコ横浜で開催

-
第98回日本生化学会大会
国立京都国際会館で11月3日から3日間

-
日本顕微鏡学会 第81回学術講演会
福岡国際会議場で6月9~11日開催

-
つくばフォーラム2025
5月15、16日 NTT筑波研究開発センタで開催

-
日本薬学会第145年会 3月26日から29日まで
福岡市のベイサイドエリアで開催

-
高レベル放射性廃棄物最終処分の必要性と安全性
企画:電気事業連合会

-
日本農芸化学会 2025年度大会
3月4日から8日まで 札幌で開催







© 2026 THE SCIENCE NEWS



