

凹凸ブロック上を走行する円形断面型クローラー搭載の移動型ロボット
NEDOロボット・AI部の渡邊恒文プロジェクトマネージャーと東北大学大学院情報科学研究科タフ・サイバーフィジカルAI研究センターの多田隈健二郎准教授らの研究グループは、全方向(360度)への連続移動が可能な円形断面型クローラーの開発に世界で初めて成功したと8月26日発表し、東北大学東京分室(東京都千代田区丸の内)で同クローラーを搭載した車両のデモンストレーションを行った。同クローラーは、全方向移動用のスクリュー式作動回転機構を新たに考案することで実現。柔らかい絨毯や点字ブロックの段差など、一般の車輪では走りにくい環境でも、クローラーの向きを変えることなくスムーズに移動することができる。






特集ページ紹介
-
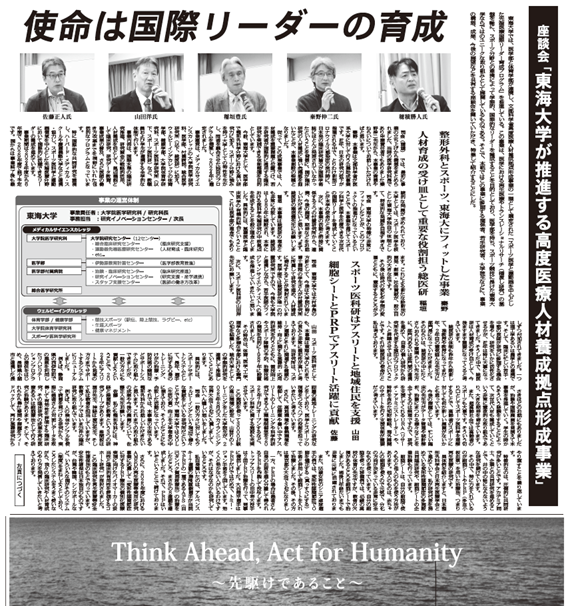
<座談会>東海大学が推進する高度医療人材養成拠点形成事業
-
特集「AI時代の電力需給展望」
企画:電気事業連合会

-
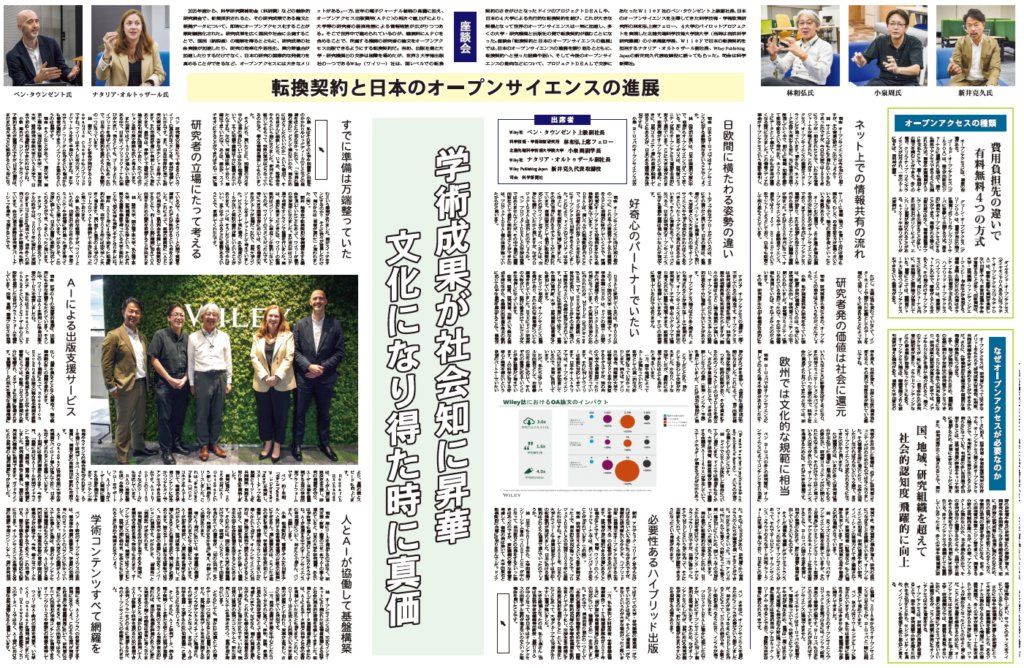
<座談会>転換契約と日本のオープンサイエンスの進展
学術成果が社会知に昇華文化になり得た時に真価
-
第48回日本分子生物学会年会
12月3日~5日 パシフィコ横浜で開催

-
第98回日本生化学会大会
国立京都国際会館で11月3日から3日間

-
日本顕微鏡学会 第81回学術講演会
福岡国際会議場で6月9~11日開催

-
つくばフォーラム2025
5月15、16日 NTT筑波研究開発センタで開催

-
日本薬学会第145年会 3月26日から29日まで
福岡市のベイサイドエリアで開催

-
高レベル放射性廃棄物最終処分の必要性と安全性
企画:電気事業連合会

-
日本農芸化学会 2025年度大会
3月4日から8日まで 札幌で開催




© 2026 THE SCIENCE NEWS



