
2021.08.20 研究・成果
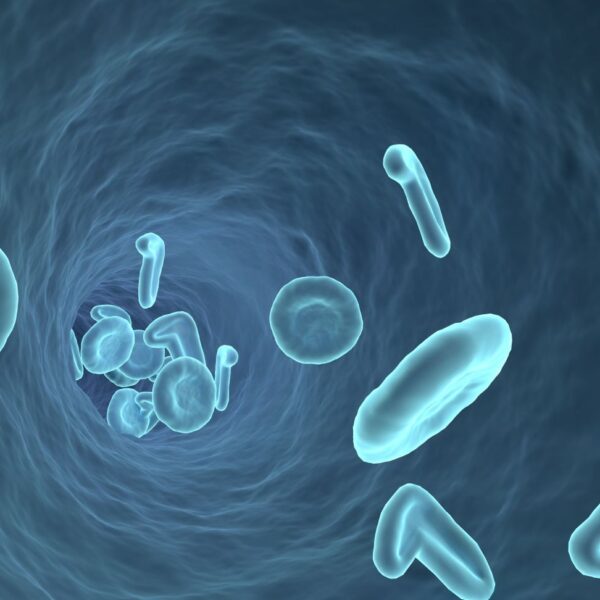
「四肢と体幹が互いの動きを補助」トカゲの歩行システムから全身運動制御の仕組み解明

四肢動物の共通祖先は、トカゲのような体幹を屈曲で行う歩行(トカゲ様歩行)をしていたと言われている。東北大学電気通信研究所の石黒章夫教授、加納剛史准教授、鈴木朱羅氏(研究当時・博士後期課程)、スイス連邦工科大学ローザンヌ校のアウケ・J・アイスペールト教授の研究グループは、トカゲ様歩行が全身運動を生み出す制御のメカニズムを解明した。「四肢と体幹がお互いの動きを補助するように動作する」という非常にシンプルな制御のルールを明らかにするとともに、世界で初めて、移動速度に応じたトカゲ様歩行のパターンの変化を再現することに成功した。四肢動物が全身の動きを巧みに操るメカニズムの解明や、新しいロボットの開発にもつながると期待される。






特集ページ紹介
-
日本顕微鏡学会 第82回学術講演会
5月25~27日 仙台国際センターで開催

-
つくばフォーラム2026
5月27日、28日開催へ

-
<座談会>東海大学が推進する高度医療人材養成拠点形成事業
-
特集「AI時代の電力需給展望」
企画:電気事業連合会

-
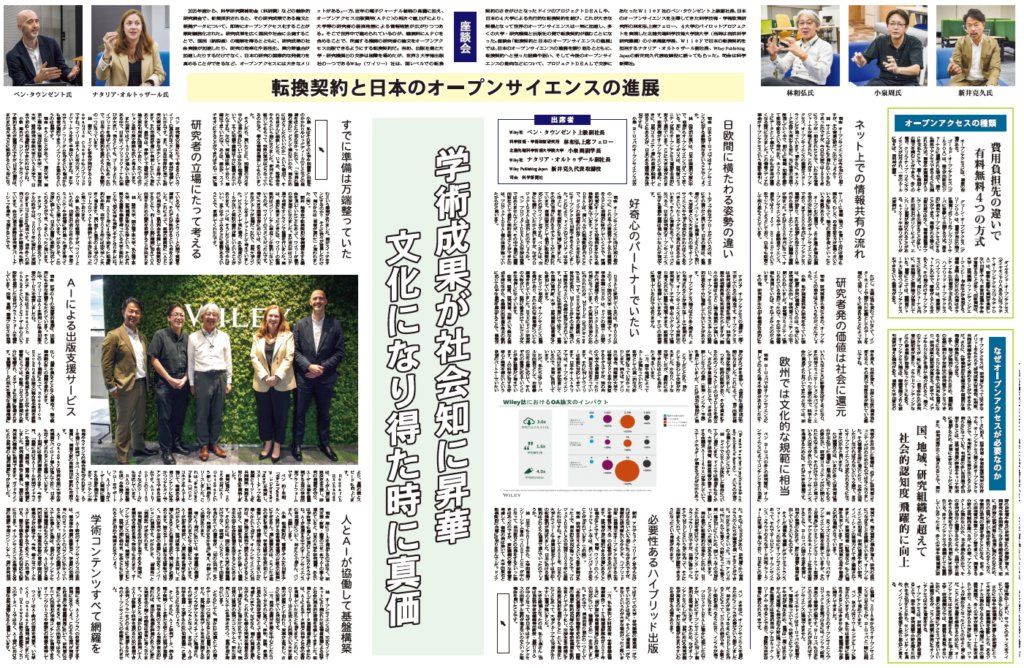
<座談会>転換契約と日本のオープンサイエンスの進展
学術成果が社会知に昇華文化になり得た時に真価
-
第48回日本分子生物学会年会
12月3日~5日 パシフィコ横浜で開催

-
第98回日本生化学会大会
国立京都国際会館で11月3日から3日間

-
日本顕微鏡学会 第81回学術講演会
福岡国際会議場で6月9~11日開催

-
つくばフォーラム2025
5月15、16日 NTT筑波研究開発センタで開催

-
日本薬学会第145年会 3月26日から29日まで
福岡市のベイサイドエリアで開催







© 2026 THE SCIENCE NEWS



