
2021.01.15 産業・製品
「人とほぼ同じ速度」果実収穫ロボットを試作 農研機構・立命大・デンソー

デンソーで行われたV字樹形のリンゴ模型を収穫する実機実演の様子。果実模型は実物と同様に形にばらつきがあるよう作製されているが、それらに対応して収穫できていた。
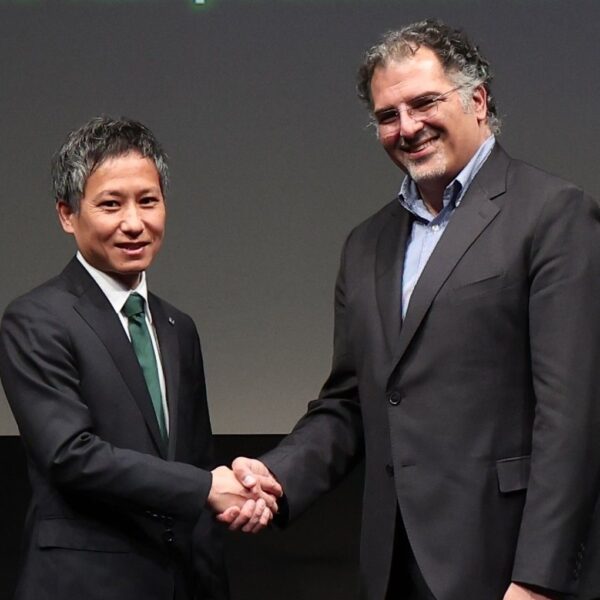
農研機構果樹茶業研究部門の草場新之助領域長、立命館大学総合科学技術研究機構の深尾隆則客員教授、デンソーFA事業部の西野秀幸課長らの研究グループは、人とほぼ同じ速度でリンゴやナシなど9品目の果実を収穫できるロボットのプロトタイプを開発したと発表した。あわせて作業の自動化・機械化に適したV字樹形を開発。ゴルフカートを改造した自動走行車両に搭載することで、ほぼ無人で収穫作業を行うことができる。農薬散布や除草作業にも対応し、トータルで50%の省力化を達成した。2年後の実用化を目指すという。果樹生産の大幅な省力化に貢献すると期待される。






特集ページ紹介
-
<座談会>東海大学が推進する高度医療人材養成拠点形成事業
-
特集「AI時代の電力需給展望」
企画:電気事業連合会

-
<座談会>転換契約と日本のオープンサイエンスの進展
学術成果が社会知に昇華文化になり得た時に真価
-
第48回日本分子生物学会年会
12月3日~5日 パシフィコ横浜で開催

-
第98回日本生化学会大会
国立京都国際会館で11月3日から3日間

-
日本顕微鏡学会 第81回学術講演会
福岡国際会議場で6月9~11日開催

-
つくばフォーラム2025
5月15、16日 NTT筑波研究開発センタで開催

-
日本薬学会第145年会 3月26日から29日まで
福岡市のベイサイドエリアで開催

-
高レベル放射性廃棄物最終処分の必要性と安全性
企画:電気事業連合会

-
日本農芸化学会 2025年度大会
3月4日から8日まで 札幌で開催




© 2026 THE SCIENCE NEWS



